Activity › Forums › Astrosoftware › PixInsight › DeepSkyStacker versus Pixinsight stacking.
Tagged: DSS PI vergelijk
- This topic has 42 replies, 5 voices, and was last updated 7 years, 3 months ago by
 Haverkamp.
Haverkamp.
-
AuthorPosts
-
January 15, 2017 at 13:54 #10759
 KeesSchererParticipant
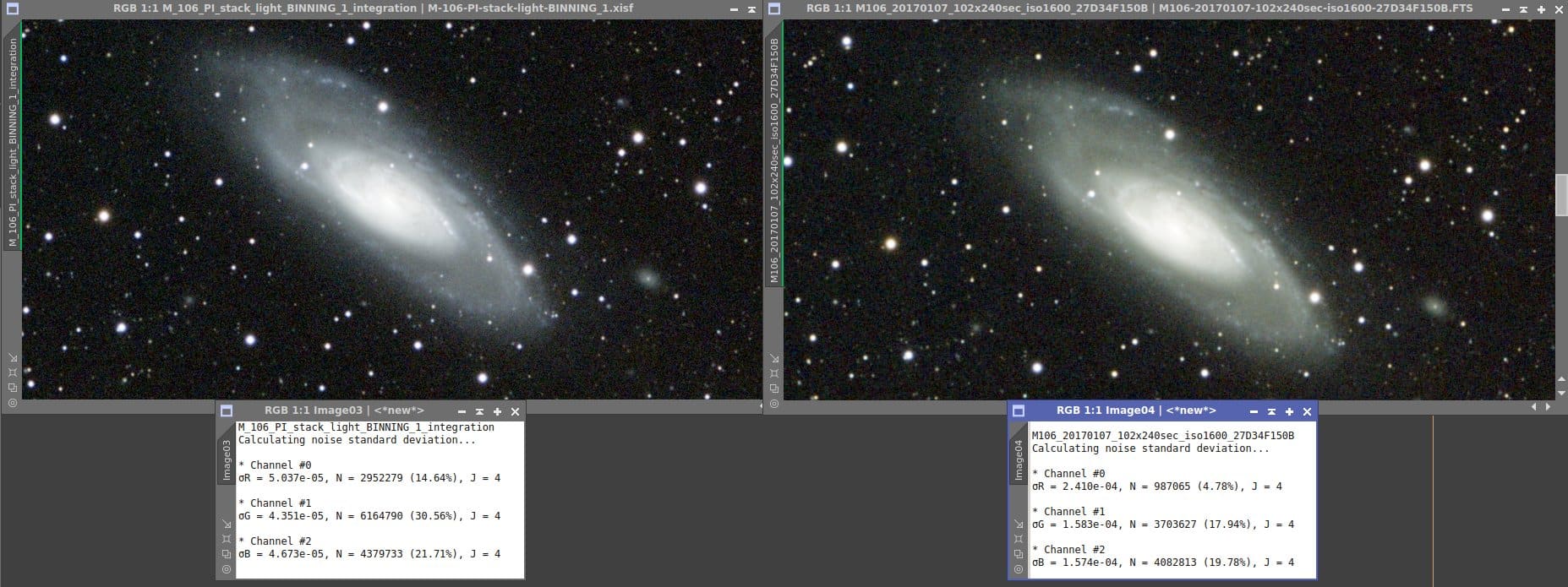
KeesSchererParticipantDit keer 102 lightframes van de M106 regio gebruikt. Standaard stack (met darks, flats en bias) in DSS vergeleken met PI Batchpreprocessing script. Geen hele workflow maar in PI voor beide stacks een histogramtransfer op basis van ontkoppelde STF, gevolgd door gelijke curves op contrast en verzadigng. (op de 100% weergave screenprints is links steeds de PI stack en rechts de DSS stack te zien.) De DSS stack heeft dan een flinke groenzweem en na toepassen van SCNR met 0.8 sterkte komen we uit bij een “DSS” opname die er heel wat slechter uit ziet dan de PI stack……. Ook de noise evaluation in de eerste schermprint laat flinke verschillen in noise nivo’s in de verschillende kanalen zien. Dit is een hele andere uitslag dan de vergelijking die ik vorig jaar maakte.

 January 15, 2017 at 13:59 #10760
January 15, 2017 at 13:59 #10760Theunissen
ParticipantDit is erg interessant. Zou het te maken hebben met de mate waarin kleur aanwezig in de subs? Dit is het enige verschil wat ik op dit moment kan verzinnen t.o.v. de subs zoals gebruikt in je artikel.
January 15, 2017 at 14:20 #10764KeesSchererParticipantDit is erg interessant. Zou het te maken hebben met de mate waarin kleur aanwezig in de subs? Dit is het enige verschil wat ik op dit moment kan verzinnen t.o.v. de subs zoals gebruikt in je artikel.
Ik weet het niet. De laatste tijd ben ik een standaard 240 seconden iso1600 light gaan gebruiken met series tussen 100 en 200 en ik wilde eens kijken of dat verschil zou maken bij de vergelijking tussen PI en DSS. Ik zal wat meer van deze vergelijkingen maken. Voornamelijk voor mijn eigen begrip, maar ik zal de bevindingen delen. Straks ook mooi te vergelijken met APP wellicht.
January 15, 2017 at 14:30 #10765 HaverkampParticipant
HaverkampParticipantLeuk, de noise evaluatie doe je zo te zien op de stack uit DSS en de stack uit PI.
Nu is mijn vraag, wat heb je gedaan met de 2 stacks om een kwalitatief zinvolle ruis vergelijking te doen?
Puur de 2 stacks door het noise script halen is namelijk geen goede vergelijking… (helemaal met de afwijkende flat calibratie van PI..)
Ik vraag dit, omdat, volgens mij, bijna iedereen dit niet goed begrijpt en dus verkeerd hanteert over het hele wereldwijde web.
Tweede vraag, heb je bij beide stacks de outlier rejectie helemaal uit gezet?
Derde vraag, welk demosaic algoritme heb je gebruikt in beide programma’s?
January 15, 2017 at 15:22 #10767KeesSchererParticipantLeuk, de noise evaluatie doe je zo te zien op de stack uit DSS en de stack uit PI. Nu is mijn vraag, wat heb je gedaan met de 2 stacks om een kwalitatief zinvolle ruis vergelijking te doen? Puur de 2 stacks door het noise script halen is namelijk geen goede vergelijking… (helemaal met de afwijkende flat calibratie van PI..) Ik vraag dit, omdat, volgens mij, bijna iedereen dit niet goed begrijpt en dus verkeerd hanteert over het hele wereldwijde web. Tweede vraag, heb je bij beide stacks de outlier rejectie helemaal uit gezet? Derde vraag, welk demosaic algoritme heb je gebruikt in beide programma’s?
Antwoord 1: Niets (Ik wilde als gebruiker op de voorgeschreven standaard methode voor beide programma’s werken)
Antwoord 2: Nee, in DSS: median Kappa Sigma clipping met Kappa=4 en 5 iteraties. In PI: Average Winsorized Sigma (4/3)
Antwoord 3: In DSS: AHD <Adaptive Homogeneity-Directed> In PI: VNG
January 15, 2017 at 16:51 #10770KeesSchererParticipantIk vraag dit, omdat, volgens mij, bijna iedereen dit niet goed begrijpt en dus verkeerd hanteert over het hele wereldwijde web.
Als gewone gebruiker van programma’s als DSS en PI kan ik niet zoveel met “bijna iedereen dit niet goed begrijpt en dus verkeerd hanteert “. Een gebruiker van een programma volgt de handleiding en zal verwachten dat er dan een goed resultaat uit komt. De gebruiker hoeft in beginsel niet de dieper liggende theorie te begrijpen.
January 15, 2017 at 17:13 #10771HaverkampParticipantExcuses, ik wilde zeker niet bot over komen ;-)
Voor mijzelf is het nogal verbazingwekkend en ook wel een beetje frustrerend om op alle fora wereldwijd te zien dat de noise analyse van PI wordt gebruikt om noise te vergelijken tussen foto’s/stacks, zonder stil te staan bij het feit dat noise sterk gecorreleerd is met de dispersie van de data. Deze fout wordt gewoon erg veel gemaakt ;-(
PI legt het in de handleiding wel uit overigens. Je kan noise pas zinvol vergelijken na een data normalisatie voor dispersie, volgens mij.
https://pixinsight.com/doc/tools/ImageIntegration/ImageIntegration.html#description_004
Als je de data 2 keer inkrimt tov van de lokatie van het histogram, dan is de noise ook meteen 2x lager. De noise van een foto/stack is nog steeds een relatieve waarde, het is geen absolute waarde die je als zodanig kan hanteren voor een direct vergelijk met een andere foto/stack. Dat is de crux en de fout die wordt gemaakt.
Stel een foto heeft een SNR van 3 en een noise van 0.0001. Als deze foto genormaliseerd wordt voor lokatie en dispersie, dan gaat de noise waarde van die foto meteen veranderen. De SNR blijft echter gelijk.
Dus mijn advies in deze is, om eens te kijken wat er met de dispersie van de data gebeurd. Je zult zien dat PI in de flat calibratie de dispersie sterk verlaagd tov de dispersie in de niet-gecalibreerde sub. In APP blijft de dispersie van een gecalibreerde sub vrijwel gelijk aan de dispersie van de niet-gecalibreerde sub. PI maakt de data compacter, en de dispersie en de ruis zijn daarom automatisch lager, Maar dat hoeft helemaal niet te betekenen dat het beter is ;-)
En in een foto zoals deze, met veel hemelachtergrond, zijn dispersie en ruis ook nog eens heel sterk gecorreleerd.
January 15, 2017 at 17:17 #10772HaverkampParticipantOutlier rejection heeft een sterke invloed op de noise die in de stack zit. En verschillende outlier filters hebben ook verschillende effecten op de ruis. Dus voor een goed vergelijk wil je denk ik dat in beide programma’s uit zetten.
January 15, 2017 at 17:22 #10773HaverkampParticipantDe verschillende demosaic algortimes hebben op hun beurt ook duidelijk invloed op noise en mogelijke injectie van groene ruis. Blijkbaar doet VNG dat een stuk beter dan AHD aangezien de DSS stack groener is begrijp ik.
January 15, 2017 at 18:02 #10774KeesSchererParticipantExcuses, ik wilde zeker niet bot over komen
Je kwam op mij niet bot over hoor Mabula. Ik ben overigens niet te beledigen want zie hier. :-)
January 15, 2017 at 18:08 #10775KeesSchererParticipant@bula . Dank je voor de uitgebreide uitleg, Ik ga even wat huiswerk doen en verder stoeien de komende dagen!
January 15, 2017 at 18:20 #10776HaverkampParticipantExcuses, ik wilde zeker niet bot over komen
Je kwam op mij niet bot over hoor Mabula. Ik ben overigens niet te beledigen want zie hier.
aiaiai, dat is een goede ;-)… gelukkig, ik dacht dat ik het misschien niet zo tactvol had neergezet…
Ik zal dit probleem proberen zo helder mogelijk uit te leggen in mijn manual.
Je kan ook de 2 stacks die je hebt beschikbaar maken via wetransfer ofzo, dan kan ik je vertellen wat APP ervan vindt qua lokatie, dispersie, snr en noise en genormaliseerd naar de DSS stack enerzijds en naar de PI stack anderzijds. Misschien dat dat ook wat verhelderd in hoe de statistiek werkt en geinterpreteerd zou moeten worden.
January 15, 2017 at 18:40 #10780 GroenewoldParticipant
GroenewoldParticipantJemig de pemig, Marc, kan je ook niet een massa-like button aanmaken ofzo? Ik klik me suf. :)
January 15, 2017 at 19:06 #10782KeesSchererParticipant@bula Ik zal de 2 stacks uploaden naar dropbox en je de link sturen. (is 500mb via 5mbit upload dus kan even duren)
January 15, 2017 at 21:20 #10796ParticipantJemig de pemig, Marc, kan je ook niet een massa-like button aanmaken ofzo? Ik klik me suf. ?
Beste tip!: gebruik de like button, die ooit als “favorite” te boek stond … als bookmark :-) … handig om dingen terug te vinden die je “leuk” vindt!
-
AuthorPosts
- You must be logged in to reply to this topic.