© 20 mei 2023, Paul Volman, Nicolàs de Hilster & starry-night.nl
Bij het collimeren van een Ritchey-Chrétien telescopen (RC’s), zoals eerder op dit forum in een artikel beschreven, wordt onder andere gebruik gemaakt van de ronde behuizing van ZWO-camera. Onlangs hebben wij (@paulvolman en @infinnitydeck) geprobeerd dezelfde methode ook op een Intes MK-72 Maksutov telescoop toe te passen, maar dat bleek niet succesvol. Een van de oorzaken voor het niet lukken van de methode leek de centrering van de beeldchip binnen de camerabehuizing te zijn en hebben we besloten dit bij een vijftal camera’s te controleren. In dit artikel kijken we naar de centreerfout van de beeldchip binnen de camerabehuizing bij camera’s van deze fabrikant en de invloed ervan op de collimatie. Vervolgens geven we een methode om de beeldchip beter te centreren en kijken we naar de centreerafwijkingen van de C-mount lens.
Inleiding
De aanleiding van dit onderzoek was het collimeren van een Intes MK-72 Maksutov telescoop die last had van een mirror-flop, zoals beschreven in een draadje op dit forum. Nadat de spiegel weer was vastgezet, was het collimeren van de telescoop de volgende fase. Net als bij een correct geconstrueerde RC, zit bij de Intes MK-72 de focusser niet van aan de hoofdspiegel vast, maar aan de behuizing. Dat betekent dat de focusser, hoofdspiegel en vangspiegel ieder op zijn beurt afgesteld moet worden. Voor het collimeren van de hoofdspiegel wordt daarbij gebruik gemaakt van de ronde behuizing van de camera om te zien of deze concentrisch getoond wordt met de lijn door het hart van de focusser en het montage-gat voor de secundaire spiegel in de spider (voor meer details zie het artikel).
Met de RC-procedure lukte het niet de telescoop goed te krijgen, hetgeen leek veroorzaakt te worden doordat de sensorchip in de gebuikte ASI290MC camera niet in het midden van de behuizing zat. Ook de beschikbare ASI120MM bleek een afwijking te hebben, maar wel kleiner dan die van de ASI290MC en het verschil tussen de twee camera’s leek terug te zien in de collimatie, waarbij de kleinere afwijking tot een beter resultaat leek te leiden. Omdat bij het collimeren van de hoofdspiegel met de bovenstaande methode het cruciaal is dat de beeldchip in het midden van de behuizing zit, je gebruikt immers de reflectie van de behuizingsring bij het afstellen van de hoofdspiegel, hebben wij besloten om bij diverse ZWO-camera’s te kijken wat nu echte de afwijking van de beeldchip ten opzichte van de behuizing is. In totaal werden hiervoor vijf ZWO-camera’s gebruikt: een ASI120MM (van PVO), een ASI290MM (NHI), twee ASI290MC’s (PVO en NHI), en een ASI174MM (NHI).
Het bepalen van de centreerfout

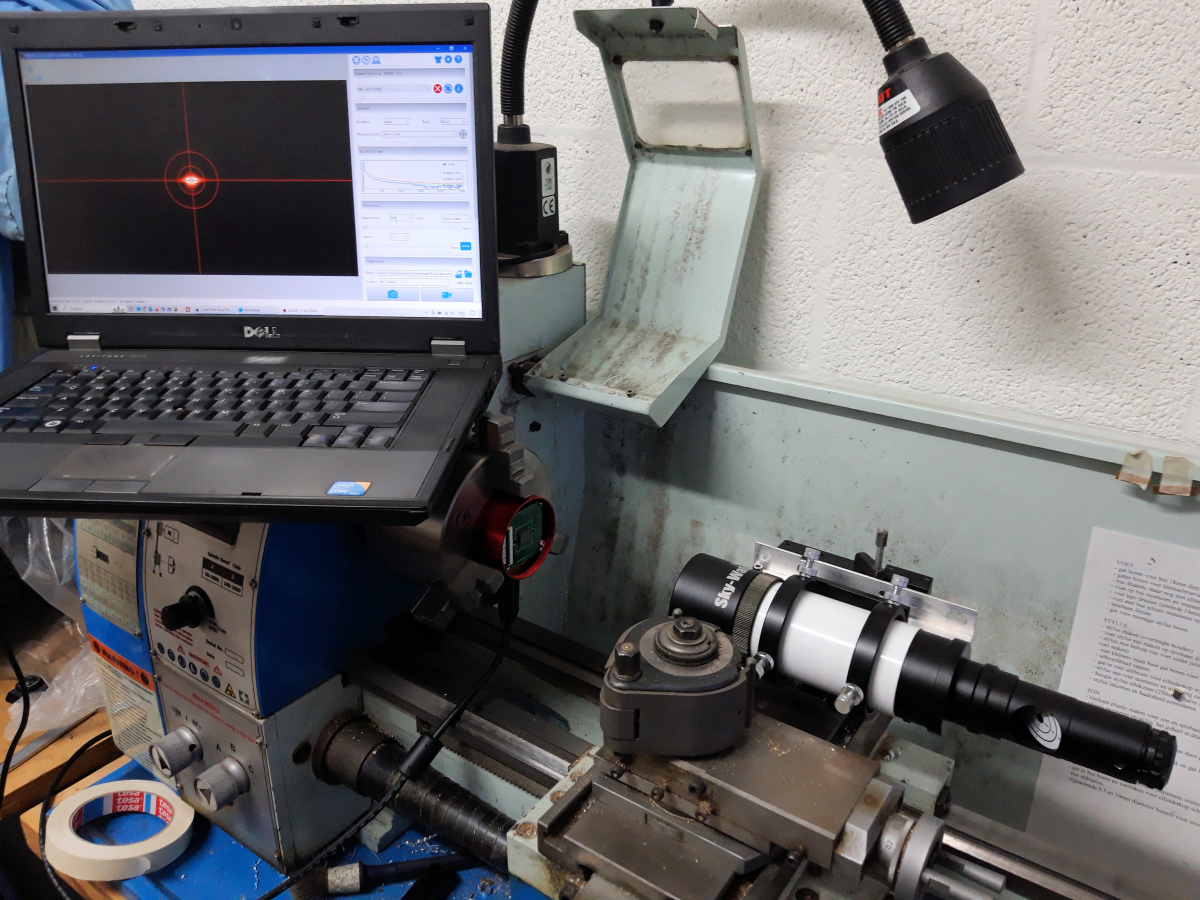
De camera’s hebben we alle vijf op de zelfde manier in een testopstelling geplaatst, bestaande uit een collimator met kunstster en een kijker die de camera vasthoudt (zie Afbeelding 1). Als collimator werd een 25cm f/5 newton telescoop gebruikt (donkerblauwe kijker in de afbeelding) met in de focusser een kunstster, gemaakt van een 9µm glasvezelkabel (gele kabel in de afbeelding). De collimator is afgesteld op oneindig waardoor een kunstster ontstaat die schijnbaar in het oneindige staat. De kijker die de camera vasthoudt is een Skywatcher Evostar 72ED (zwart-witte kijker in de afbeelding), welke op een een alt-azi verstelbare bok voor de collimator geplaatst is.
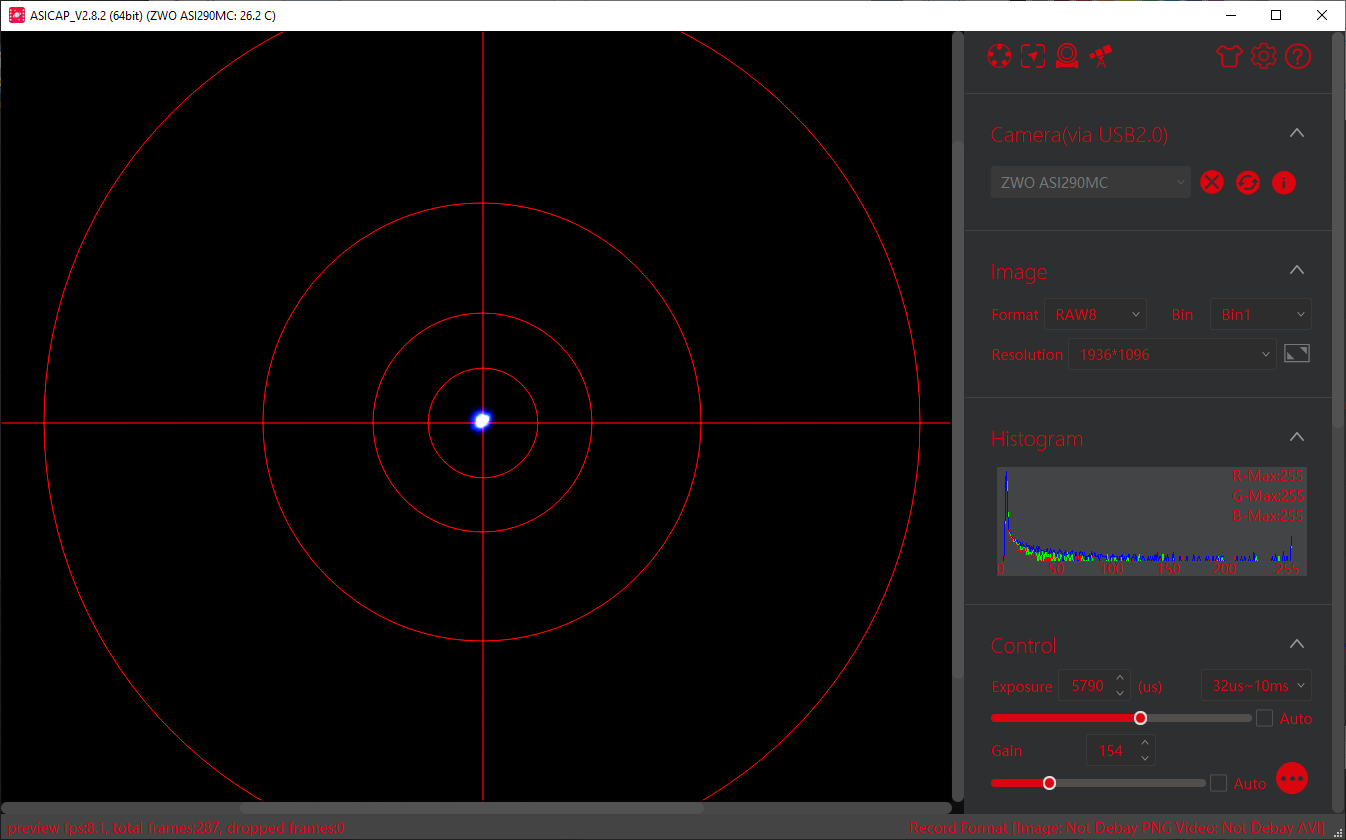
De procedure voor het testen van de camera’s is vrij eenvoudig: de camera wordt geplaatst en de bok wordt versteld totdat de kunstster in het midden van de beeldchip staat, iets dat eenvoudig te controleren is door middel van de digitale kruisdraad van de camera-software ASICAP (zie Afbeelding 2).
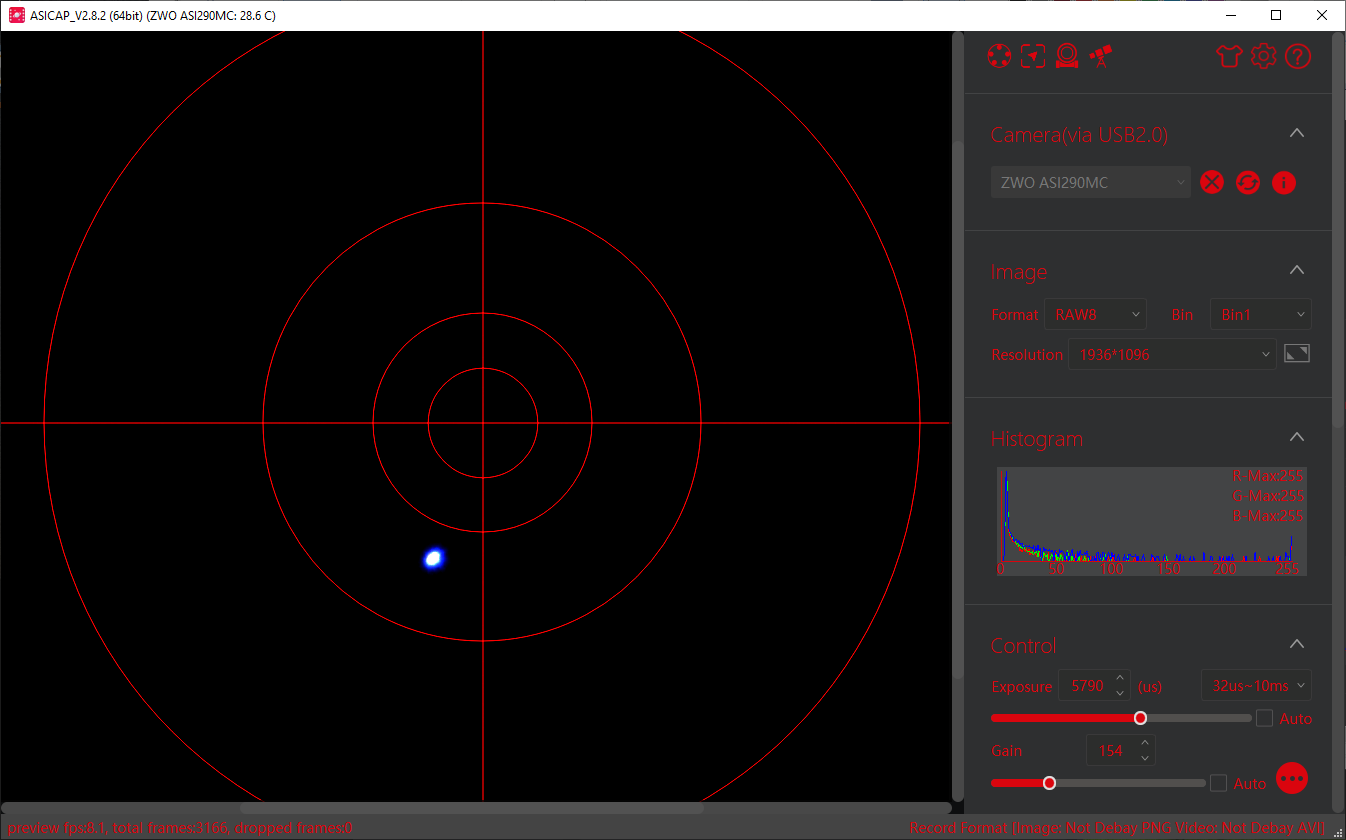
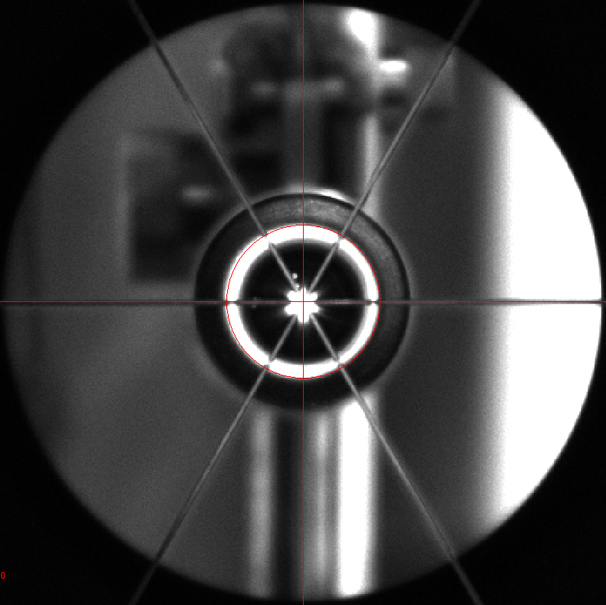
Vervolgens wordt de camera 180 graden langs de optische as gedraaid en gekeken waar de kunstster dan verschijnt (zie Afbeelding 3). Het is bij de camera in dit voorbeeld direct duidelijk dat de chip niet in het midden zit, maar om dit goed te meten is de procedure flink uitgebreid.
Aangezien het aannemelijk is dat het losnemen en terugplaatsen van de camera al tot afwijkingen zal leiden, zijn er meer metingen nodig. De camera is daartoe in de eerste stand, dus waarbij de kunstster gecentreerd wordt, tien keer los genomen en weer teruggeplaatst, waarbij iedere keer een schermafbeelding gemaakt is zodat de afwijkingen te meten zijn (dit is meting A). Deze schermafbeeldingen zijn gemaakt bij 100% zoom, zodat elke pixel van de camera overeenkomt met elke pixel op het beeldscherm (we hebben gebruik gemaakt van schermafbeeldingen, omdat alleen dan ook de digitale kruisdraad opgeslagen wordt). Ditzelfde is gedaan in de tweede stand, dus waarbij het zichtbaar wordt dat de chip niet gecentreerd is (meting B), en tot slot is de camera nogmaals tien keer in de eerste stand gemeten om te zien of de hele opstelling niet tussendoor verstoord is (meting C). De camera’s werden hierbij in een 2” Robtics adapter gezet en voorzien van een markering om bij het verwijderen en opnieuw terugplaatsen de camera steeds zo goed mogelijk in dezelfde rotatie-positie in de telescoop te krijgen (de ZWO-camera’s hebben allemaal een 2″ rand, zodat de camera’s ook zonder 1.25″ nose-cone gebruikt kunnen worden). Bij het terugplaatsen werd bovendien gelet op de zelfde volgorde en kracht van aandraaien van de klemschroeven van de 2″ adapter.
Per camera zijn op deze manier 30 metingen verricht, resulterend in de volgende parameters:
- de herplaatsbaarheid van de camera (gemiddelde standaarddeviatie van de afzonderlijke metingen A, B en C);
- de stabiliteit van de opstelling, hieronder aangeduid met Sluitfout A-C (verschil tussen de gemiddelden van metingen A en C);
- de centreerfout van de beeldchip (helft van het verschil tussen de gemiddelden van de gecombineerde metingen A+C en meting B);
- de nauwkeurigheid waarmee de centreerfout bepaald is (bepaald uit de voortplantingswet van de varianties uit metingen A, B en C).
Aangezien het bepalen van het midden van de kunstster in de schermafbeeldingen handmatig moest gebeuren, is het niet uit te sluiten dat hier nog een menselijke fout insluipt. Om de kans hierop te minimaliseren, zijn de metingen door beide auteurs uitgewerkt en is het gemiddelde hiervan gebruikt in de berekeningen. Uit de metingen zijn de volgende numerieke waarden gekomen (de metingen zijn verricht in pixels en omgerekend naar micrometers met behulp van de bekende pixelsgroottes van de camera’s):
| Camera | Centreerfout ((A+C – B)/2) [μm] | STDEV [μm] | Sluitfout A – C [μm] |
|---|---|---|---|
| ASI120MM PVO | 109.2 | 18.7 | 13.7 |
| ASI174MM NHI | 236.8 | 17.8 | 3.8 |
| ASI290MC NHI | 215.7 | 35.4 | 4.3 |
| ASI290MC PVO | 257.0 | 19.5 | 4.8 |
| ASI290MM NHI | 291.3 | 22.8 | 1.7 |
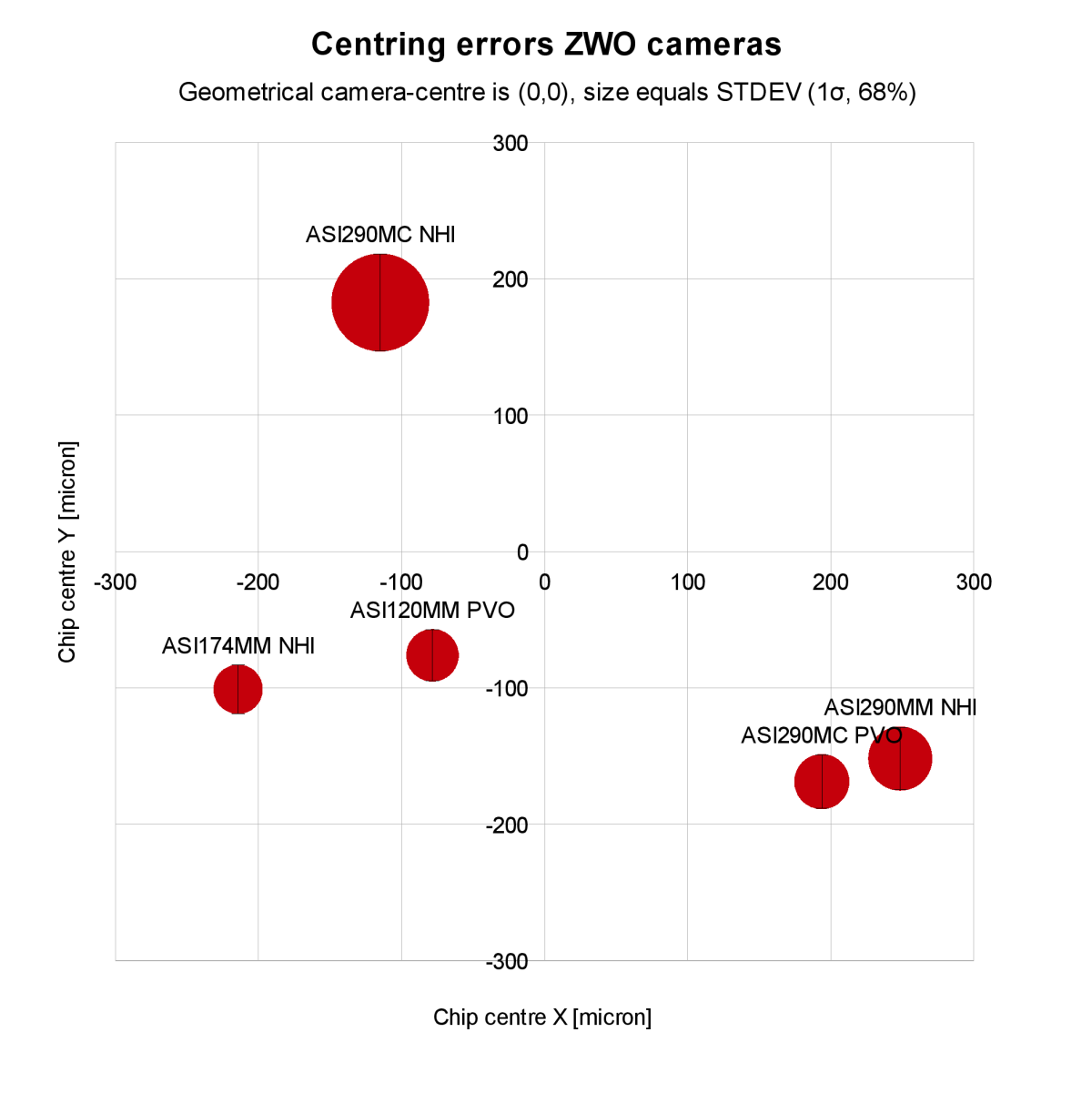
Uit bovenstaande tabel blijkt duidelijk dat de gemeten centreerfouten significant groter zijn dan de sluitfouten en standaardafwijkingen (op 1σ, 68% betrouwbaarheidsinterval) en dat deze dus reëel zijn. De gemiddelde centreerfout is 222μm (0.222 millimeter) en dus aanzienlijk te noemen. Afbeelding 4 laat de centreerfouten grafisch zien, waarbij de rode stippen proportioneel geschaald zijn met de standaarddeviaties van de metingen. De afbeelding is met de fabrikant gedeeld en uit hun reactie bleek dat de getoonde afwijkingen niet ongewoon zijn.
De invloed van de centreerfout op de collimatieprocedure
Zoals we hierboven gezien hebben, is de gemiddelde centreerfout circa een kwart millimeter. De verwachting was echter dat dit niet van invloed kon zijn. Bij het collimeren van de hoofdspiegel wordt deze namelijk opgelijnd met de mechanische kijkeras door een lichtbron van 2 millimeter diameter in de visual-back op te lijnen met een reflecterende ring met een opening van 7 millimeter in de spider. Dit laatste gat is tijdens het afregelen op het beeldscherm zichtbaar als een donkere cirkel met een diameter van circa 18 pixels. Iedere pixel vertegenwoordigt dus circa 7/18 = 0.4 millimeter en aangezien de spider op circa een derde van de afstand tussen hoofdspiegel en camera staat, zou de centreerfout van de beeldchip ter hoogte van de spider ruim minder dan een tiende millimeter zijn (gemiddeld 0.222/3 millimeter voor de onderzochte camera’s). Aangezien dit slechts een kwart van de 0.4 millimeter per pixel beeldresolutie is, kan dit dus haast niet waargenomen worden.
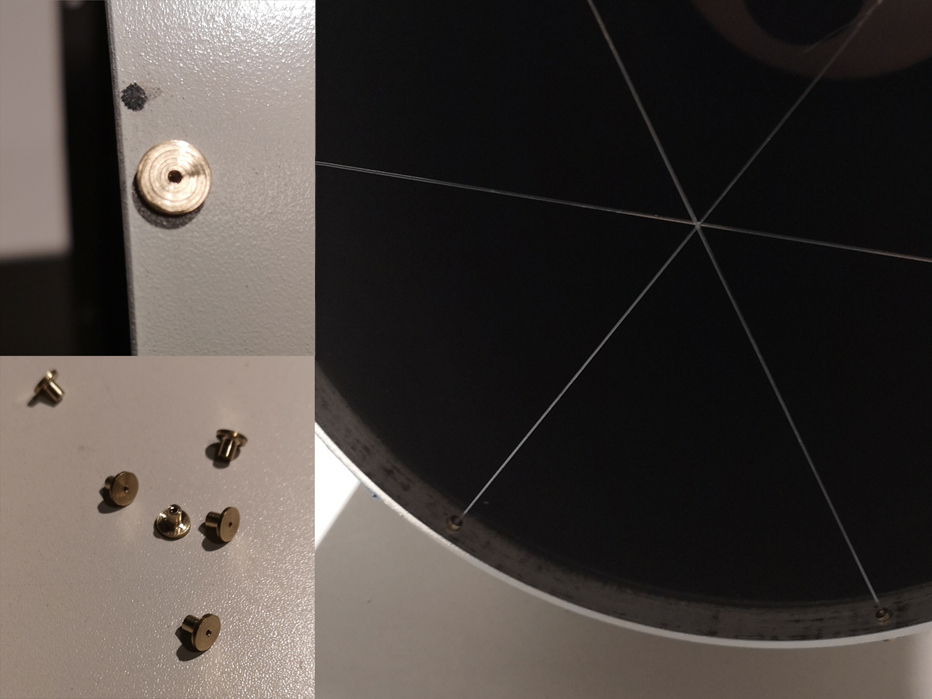
Bij het collimeren van de Intes-hoofdspiegel is er echter geen spider en dus werd een kunstmatige spider gemaakt met behulp van 0.5 millimeter nylondraad, welke door de schroefgaten voor het bevestigen van de correctorplaat geregen is (de correctorplaat is tijdens dit proces gedemonteerd, zie afbeelding 5). Visueel leken de drie draden keurig in één punt te snijden, dus zou dit het midden van de apertuur moeten vertegenwoordigen. Nu zijn de drie draden 0.5 millimeter dik en zit wederom de spider op circa een derde van de afstand tussen spiegel en camera, ook hier zou de centreerfout niet of nauwelijks waarneembaar moeten zijn.
Toch meenden beide auteurs wel te kunnen zien dat er verschil was tussen beide gebruikte camera’s. Bij het afregelen van de hoofdspiegel wordt niet alleen gekeken of de camerabehuizing gecentreerd te zien is ten opzichte van de spider, maar vooral of de spider goed samenvalt met z’n reflectie. Indien dit laatste het geval was, leek het wel dat de camerabehuizing iets excentrisch getoond werd (zie afbeelding 6). En dus besloten we te kijken of we de beeldchip beter konden centreren in de camerabehuizing.
Het centreren van de beeldchip
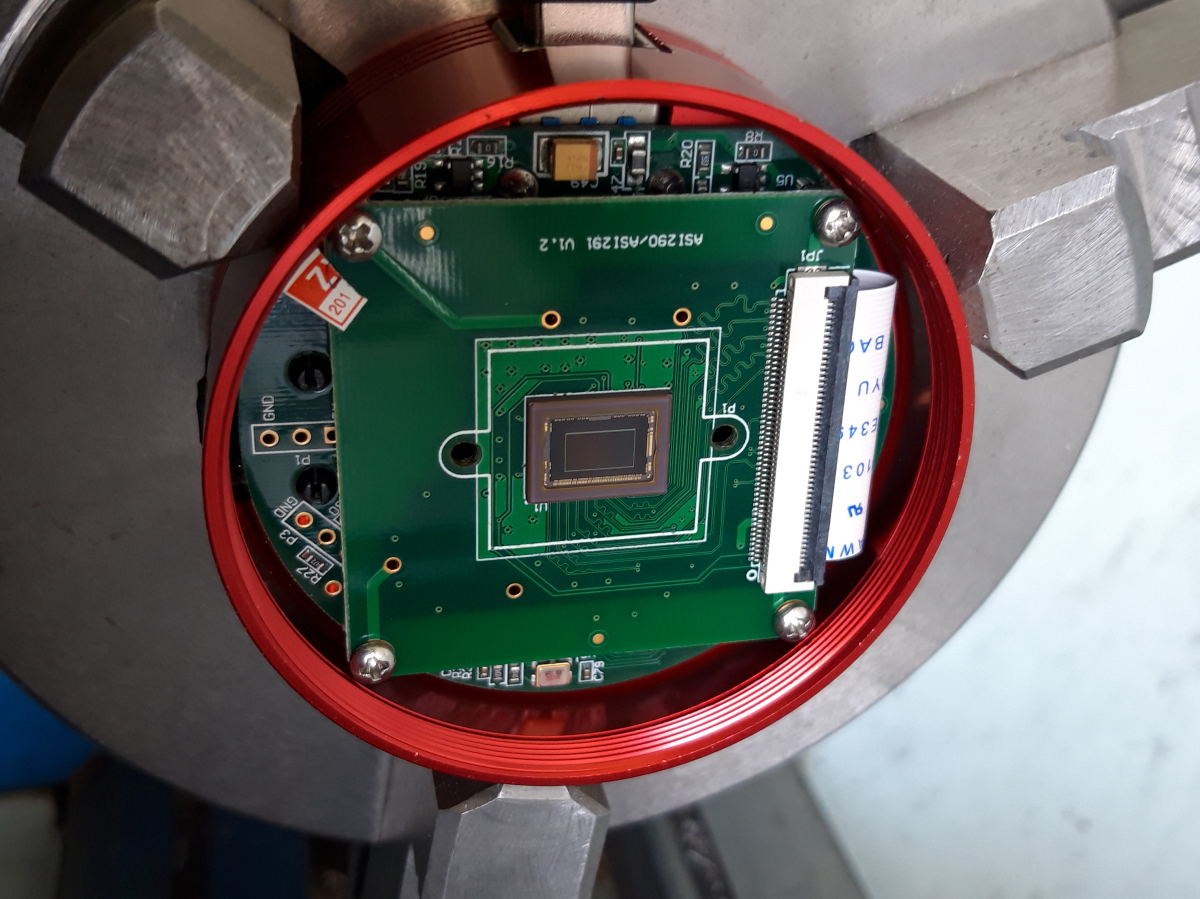
Voor het centreren van de beeldchip moesten we nog een procedure verzinnen. Op zich laat de constructie van de camera het centreren prima toe. De beeldchip zit namelijk op een aparte print welke met vier schroefjes aan het moederbord vastzit (zie afbeelding 7). Door nu de vier schroefjes net genoeg los te draaien om de printplaat te kunnen verschuiven, terwijl ze genoeg weerstand blijven geven om de print niet terug te laten veren, kunnen we de beeldchip proberen te centreren.

Maar wat is het midden? Op de draaibank hebben we eerst getest of de behuizing goed rond is en ook of de deksel waar de 2″ aansluiting aan zit gecentreerd zit ten opzichte van de camerabehuizing. Bij de eerste camera die we testte, bleek dit binnen 0.01 millimeter te kloppen. Latere tests met een van de andere camera’s wezen uit dat dit niet altijd het geval is en dat de 2″ aansluiting 0.1 millimeter excentriciteit kan vertonen ten opzichte van de behuizing.
De eerste poging de beeldchip te centreren was visueel (zie afbeelding 8). De camera werd geopend gemonteerd in de draaibank en een tweede camera, voorzien van een lens, werd ertegenover opgesteld. De tweede camera werd zodanig geplaatst dat de kruisdraden ervan netjes samenvielen met het centrale grijze vlak van de beeldchip. Door de klauw van de draaibank nu 180 graden te draaien, werd de excentriciteit zichtbaar gemaakt. Vervolgens werd de registrerende camera halverwege de getoonde afwijking verplaatst en vervolgens werd de print met de beeldchip in het midden van het kruisdraad geschoven. Door nu de klauw wederom 180 graden te draaien, wordt inzichtelijk gemaakt of de beeldchip nu wel gecentreerd is (zie afbeelding 9). De methode bleek echter niet nauwkeurig genoeg, wellicht doordat niet het hele visuele vlak daadwerkelijk voor de beeldproductie gebruikt wordt.

De methode die wel werkt, is door middel van een laser. De camera wordt wederom in de draaibank gemonteerd en de centrering in de klauw gecontroleerd. De camera wordt aangesloten en vervolgens wordt een stabiele opstelling met een laser gemaakt, welke precies het midden van de digitale kruisdraad beschijnt. Door nu de wederom de klauw van de draaibank te draaien wordt inzichtelijk gemaakt wat de centreerfout is. Vervolgens kan de laser weer de helft van de fout verplaatst worden en wordt de beeldchip over de overige afstand verschoven. Na wederom draaien van de klauw wordt inzichtelijk wat de resterende centreerfout is en kan de procedure herhaald worden totdat de centreerfout acceptabel klein is.

Aanvankelijk werd de laser direct op de beeldchip gericht, maar de daaruit resulterende vlek was te groot om goed mee te kunnen werken (zie afbeelding 10). De vlek kan kleiner gemaakt worden door de laser met behulp van een lens tot een focuspunt te brengen. De oplossing werd gevonden door een lasercollimator voor Newton-telescopen te combineren met een Skywatcher-zoeker en het geheel op een kruistafel te monteren (zie afbeelding 11). De twee konden eenvoudig gecombineerd worden doordat de Skywatcher-zoeker voorzien is van schroefdraad met een spoed van 0.75 millimeter bij een diameter van 50.3 millimeter, dus net iets kleiner dan de 2″ (50.8 millimeter) buitendiameter van de lasercollimator. Die laatste werd dus een halve millimeter afgedraaid en van 0.75 millimeter draad voorzien.
Met deze laseropstelling is het nu wel goed mogelijk de beeldchip te centreren (zie afbeelding 12). De controle, zoals aan begin van dit artikel besproken, leerde echter dat na centreren er toch nog een centreerfout van net geen 0.1 millimeter aanwezig was. De oorzaak bleek in de eerder genoemde excentriciteit van de 2″ aansluiting te zijn. Het centreren was immers op de behuizing gedaan, terwijl het testen op de 2″ aansluiting gebeurde. De excentriciteit van de 2″ aansluiting liet zich met een meetklok op de draaibank prima bepalen en komt goed overeen met de controlemeting voor de collimator. We kunnen er dus van uitgaan dat het centreren goed geslaagd is. Voor het gebruik van de camera bij het collimeren van hoofdspiegels is deze afwijking niet van belang, aangezien het de buitenkant van de behuizing is die gebruikt wordt bij het collimeren en we de beeldchip met die buitenkant opgelijnd hebben.
Excentriciteit van de C-mount lens
De laatste fout bleek nog in de C-mount lens te zitten. De lens zit met een T2 naar C-mount adapter aan de camera vast, maar deze adapters zijn niet goed gecentreerd. Afbeelding 13 laat het effect zien van het omdraaien van deze adapter. Bij deze opnames was de camera in de klauw van de draaibank gemonteerd en kon dus niet bewegen. De ZWO zoomlens werd gemonteerd en de een opname gemaakt. Vervolgens werd de lens gedemonteerd en de T2 naar C-mount adapter omgekeerd. Na montage van de lens werd de tweede opname genomen. Dezelfde test werd herhaald met 25mm en 35mm C-mount lenzen met soortgelijk resultaat.
De verschuiving van het beeld heeft echter vrijwel geen effect op het collimeren van hoofdspiegel van een te collimeren RC. De camera dient een klein stukje in alt/azi verdraaid te worden ten einde de optische as van de kijker in het midden van de beeldchip te krijgen. Dit verdraaien zal ervoor zorgen dat het in de hoofdspiegel gereflecteerde beeld van de camerabehuizing iets tot een ellips vervormd wordt, maar zo weinig dat dit hoogstwaarschijnlijk niet zichtbaar is.
Conclusie
Voor toepassingen waar het concentrisch zijn van de beeldchip met de camerabehuizing kritisch is, loont het de moeite de excentriciteit van de beeldchip te controleren. Wel dient daarbij ook gecontroleerd te worden of de 2″ aansluiting concentrisch is met de camerabehuizing aangezien dit niet altijd het geval is. Indien de beeldchip inderdaad niet gecentreerd gemonteerd is, dan is dit het beste af te regelen door de camera in een draaibank te monteren en met een gefocuste laser het centrum te bepalen. Als een eventueel gemonteerde lens niet-concentrisch gemonteerd zit, zal dit ervoor zorgen dat de camera in het gebruik slechts iets gekanteld moet worden. Zolang de afwijking klein is, zal dit niet van invloed zijn op het concentrische beeld dat de camera levert. Naar verwachting is de invloed van de centreerfout van de beeldchip op de collimatie van reflectors niet significant, zolang bij het afstellen van de hoofdspiegel erop gelet wordt dat de (kunstmatige) spider met de reflectie ervan samenvalt.
© 20 mei 2023, Paul Volman, Nicolàs de Hilster & starry-night.nl