Activity › Forums › Astrosoftware › PixInsight › DeepSkyStacker versus Pixinsight stacking.
Tagged: DSS PI vergelijk
- This topic has 42 replies, 5 voices, and was last updated 9 years, 5 months ago by
 Haverkamp.
Haverkamp.
-
AuthorPosts
-
January 16, 2017 at 16:11 #10857
 HaverkampParticipant
HaverkampParticipantOkee, ik heb de 2 stacks uit DSS en PI van @keesscherer bekeken en geanalyseerd met Astro Pixel Processor.
APP bekijkt het als volgt:
Allereerst heb ik voor een goede vergelijking de twee stacks met elkaar geregistreerd via Lanczos-3 en vanuit de 2 geregistreerde stacks heb ik identieke crops genomen. Dus we hebben nu een exact gelijk beeldveld voor beiden stacks.
Nu gaan we kijken wat er gebeurd met de 2stacks als we
1) alleen normaliseren voor de lokatie ( add )van de histogrammen van de stacks
2) normaliseren voor zowel lokatie als dispersie ( add + scale )van de histogrammen van de stacksin beide gevallen worden de gevonden lokaties van de kanalen gebruikt voor het neutraliseren van de achtergrond.
en dat doen we 2 kanten op.
a) met de PI stack als referentie
b) met de DSS stack als referentieDus we hebben 2*2 = 4 situaties waarin we de 2 stacks bekijken en vergelijken met elkaar. Visueel en in getallen.
Ik laat het eerst in plaatjes zien, dan zie je wat de data normalisatie voor dispersie in feite doet.
Data normalisatie voor lokatie is enkel de achtergronden additief (middels een offset die zowel + als – kan zijn ) gelijk trekken.
Alle plaatjes die getoond worden van de 2 stacks naast elkaar hebben een identieke preview stretch gekregen van de lineaire data.1) Alleen normalisatie voor lokatie
——————————–
a) PI stack referentieEerste plaatje is de PI stack
Tweede plaatjes is de DSS stackAan de breedte van de histogram pieken zie je dat de dispersie van de DSS stack veel groter is, of andersom de PI stack heeft veel lagere dispersie.

 January 16, 2017 at 16:15 #10861HaverkampParticipant
January 16, 2017 at 16:15 #10861HaverkampParticipant1) Alleen normalisatie voor lokatie
————————————
b) DSS stack referentieEerste plaatje is de PI stack
Tweede plaatjes is de DSS stackAan de breedte van de histogram pieken zie je dat de dispersie van de DSS stack veel groter is, of andersom de PI stack heeft veel lagere dispersie.
Tussen situatie 1a) en 1b) zie je dat de stacks niet goed te vergelijken zijn als je alleen normaliseert voor lokatie. Als je de PI stack neemt, wordt de DSS rood en andersom wordt de PI stack blauw.

 January 16, 2017 at 16:26 #10866HaverkampParticipant
January 16, 2017 at 16:26 #10866HaverkampParticipant2) normaliseren voor zowel lokatie als dispersie
a) PI stack referentieEerste plaatje is de PI stack
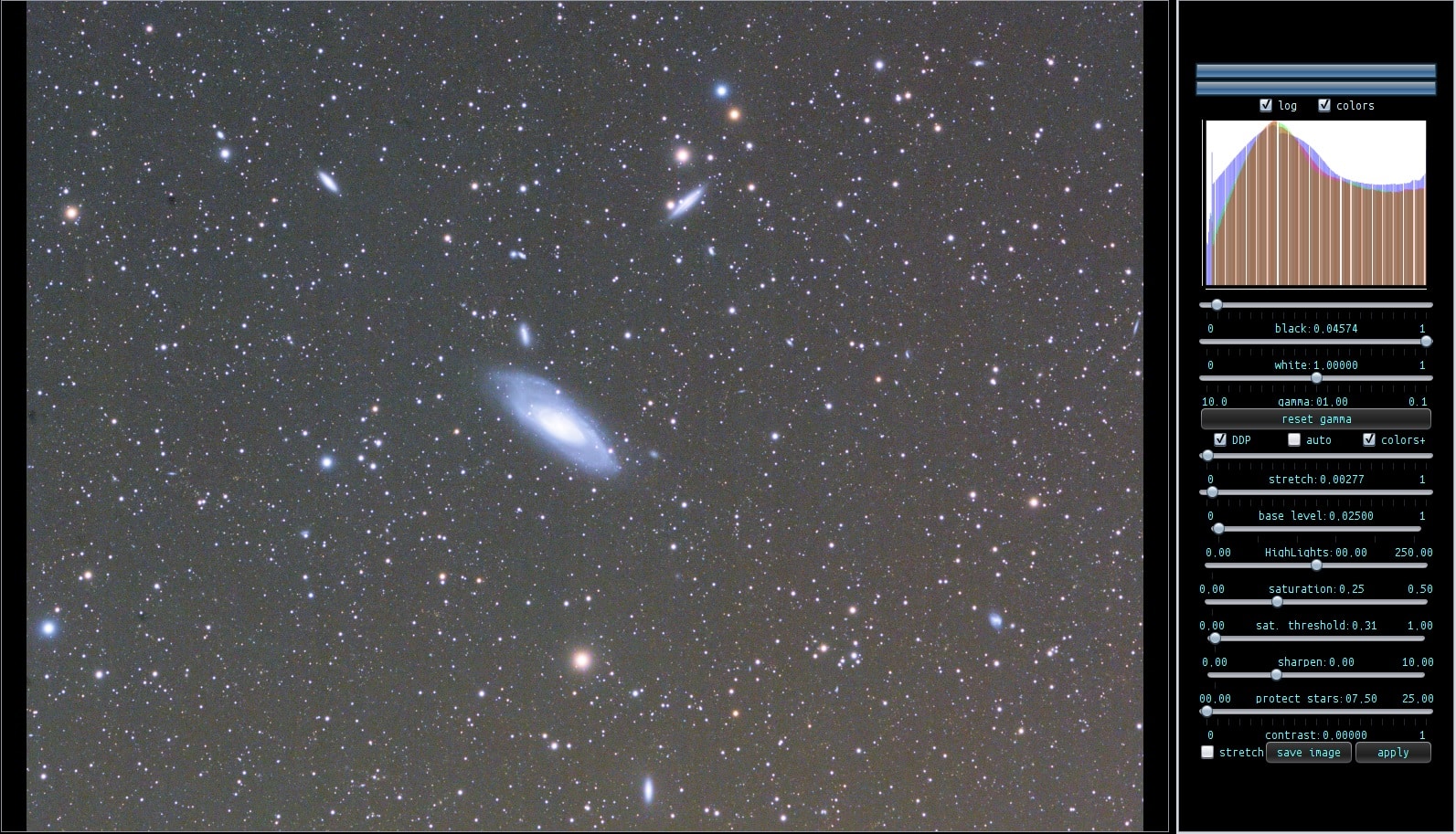
Tweede plaatjes is de DSS stackAan de breedte van de histogram pieken zie je nu dat de dispersie correct is genormaliseerd. De pieken zijn even breed geworden per kanaal. De breedte van de piek is de dispersie. Let op, uiteraard weer getoond met voor beide plaatjes een identieke stretch.

 January 16, 2017 at 16:36 #10869HaverkampParticipant
January 16, 2017 at 16:36 #10869HaverkampParticipant2) normaliseren voor zowel lokatie als dispersie
b) DSS stack referentieEerste plaatje is de PI stack
Tweede plaatjes is de DSS stackNu wordt het interessant ;-),
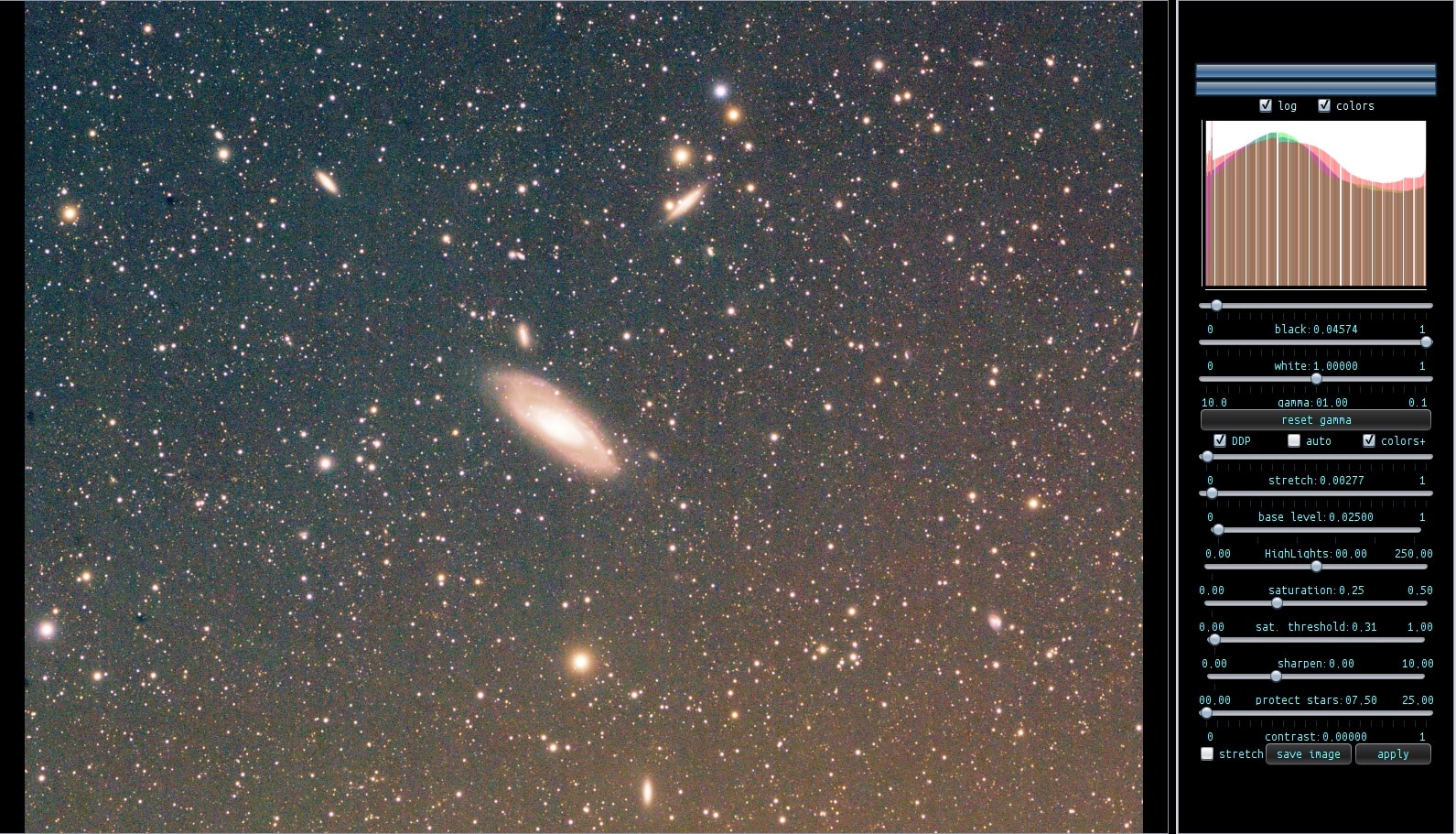
je ziet aan de histogrammen weer dat de dispersie correct is genormaliseerd. De histogram pieken van beide plaatjes zijn even breed. Maar ze zien er anders uit dan in situatie 2a).
In situatie 2a) ziet de PI stack er goed uit, en de DSS stack wordt groenig.
Maar in situatie 2b) ziet de DSS er goed uit en de PI stack wordt magenta, dat is de tegengestelde kleur van groen. Omdat groen veel meer bijdraagt aan de Luminance, zie je de magenta verkleuring minder goed, maar hij is zeker aanwezig. In het sterrenstelsel zie je dat het blauw, paarsig wordt in de PI stack.
 January 16, 2017 at 16:41 #10870HaverkampParticipant
January 16, 2017 at 16:41 #10870HaverkampParticipantHier wordt ook direct aangetoond dat data normalisatie, wat een essentieel onderdeel is van een goede integratie van onze foto’s, een invloed heeft op de kleur van je foto’s. Ik heb samen met @chrisvdberge en een aantal amerikaanse fotografen, hier nog een leuke discussie over gehad op Cloudy Nights herinner ik mij… maar dat is voor een andere keer ;-)
January 16, 2017 at 16:55 #10871HaverkampParticipantNu gaan we het uitdrukken in getallen voor lokatie en dispersie en MRS gaussische ruis en Signaal tot (MRS)Ruis verhouding, de SNR.
Allereerst moet je de lokatie en dispersie bepalen van beiden stacks, zodat deze met elkaar genormaliseerd kunnen worden, op de manier zoals je dat wilt.
Let op, dat getallen zijn genormaliseerde floats in het bereik van 0 tot 1.
Pi Stack:
lokatie rood : 0.0469
lokatie groen : 0.0293
lokatie blauw : 0.0234DSS Stack:
lokatie rood : 0.1250
lokatie groen : 0.0491
lokatie blauw : 0.0233Hmmm… dat is op het eerste gezicht heel vreemd, de stacks zijn uit dezelfde lights gemaakt, hoe kan je dan in rood en groen zijn groot verschil krijgen?
Laten we kijken naar de dispersie van de stacks, dit is gedaan met een methode genaamd, de Bi-Weight Mid-Variance of BMV:
Pi Stack:
dispersie rood : 0.000289
dispersie groen : 0.000188
dispersie blauw : 0.000214DSS Stack:
dispersie rood : 0.000745
dispersie groen : 0.000300
dispersie blauw : 0.000268? nu wordt het nog vreemder, nu komt geen 1 kanaal meer met elkaar overeen…
Je ziet wel in getallen nu wat we ook in de plaatjes zagen, de PI stack heeft een lagere dispersie dan de DSS stack, en andersom, de DSS stack heeft een grotere dispersie.
January 16, 2017 at 17:02 #10873Theunissen
ParticipantIk ben nu wel nieuwsgierig hoe een APP stack zich verhoud tegenover al het bovenstaande.
January 16, 2017 at 17:11 #10874HaverkampParticipantNu gaan we kijken wat dit betekent voor de ruis in de stacks als we alleen voor lokatie normaliseren. In dit geval wordt de achtergrond niet geneutraliseerd middels de lokatie waardes, want dan worden de kanalen met een multiplier aangepast en dat veranderd de MRS ruis waardes ook weer.
1a) normalisatie alleen voor lokatie en de PI stack als referentie
MRS ruis :
———-
Pi stack:
rood noise 1.7387604981816365E-4 percentage 21.52440434883183 scales 4
groen noise 1.4563851524116464E-4 percentage 37.826740689336106 scales 4
blauw noise 1.5878846496809418E-4 percentage 28.9440203562341 scales 4DSS stack
rood noise 3.359768775582393E-4 percentage 11.857900658212941 scales 4
groen noise 2.01182926152243E-4 percentage 27.703562340966922 scales 4
blauw noise 1.9881154102635172E-4 percentage 30.01387925052047 scales 41b) normalisatie alleen voor lokatie en de DSS stack als referentie
MRS ruis :
———-
Pi stack:
rood noise 1.7388137986821465E-4 percentage 21.52440434883183 scales 4
groen noise 1.4563852790994107E-4 percentage 37.826740689336106 scales 4
blauw noise 1.5878846471429334E-4 percentage 28.9440203562341 scales 4DSS stack
rood noise 3.3597687754919237E-4 percentage 11.857900658212941 scales 4
groen noise 2.0118292601146981E-4 percentage 27.703562340966922 scales 4
blauw noise 1.988115330530015E-4 percentage 30.01387925052047 scales 4Wat valt op? we zien dat de ruis in alle drie de kanalen in de PI stack lager is, en we zien ook dat data normalisatie enkel voor lokatie geen enkel effect heeft op de ruis. Want bij verschillende referenties, vinden we dezelfde ruiswaardes binnen de meet onzekerheid.
Maar we weten ook inmiddels door het bekijken van de plaatjes, dat enkel normaliseren voor lokatie geen goede vergeliijking geeft voor het vergelijken van ruis waardes. We moeten normaliseren voor dispersie om een goede ruis vergelijking te kunnen maken.
January 16, 2017 at 17:27 #10878HaverkampParticipantDus nu kijken we naar de ruis waardes na normalisatie voor lokatie en dispersie:
1a) normalisatie voor lokatie en dispersie en de PI stack als referentie
MRS ruis :
———-
Pi stack:
rood noise 1.7387604981816365E-4 percentage 21.52440434883183 scales 4
groen noise 1.4563851524116464E-4 percentage 37.826740689336106 scales 4
blauw noise 1.5878846496809418E-4 percentage 28.9440203562341 scales 4DSS stack
rood noise 1.3034093688754118E-4 percentage 11.857900658212941 scales 4
groen noise 1.2618303848995646E-4 percentage 27.703562340966922 scales 4
blauw noise 1.5893976455621237E-4 percentage 30.01387925052047 scales 41b) normalisatie alleen voor lokatie en de DSS stack als referentie
MRS ruis :
———-
Pi stack:
rood noise 4.4801952344775657E-4 percentage 21.388398208314932 scales 4
groen noise 2.3215912911335305E-4 percentage 37.826740689336106 scales 4
blauw noise 1.986222838949943E-4 percentage 28.920888272033313 scales 4DSS stack
rood noise 3.3597687754919237E-4 percentage 11.857900658212941 scales 4
groen noise 2.0118292601146981E-4 percentage 27.703562340966922 scales 4
blauw noise 1.988115330530015E-4 percentage 30.01387925052047 scales 4Wat valt nu op?
– normalisatie voor dispersie heeft duidelijk invloed op de MRS noise die wordt gevonden.
– de noise van de referentie blijft intact
– de noise van het frame wat wordt genormaliseerd veranderd
– de noise van de stacks komt na normalisatie voor dispersie veel meer overeen dan zonder, maar er zijn verschillen
– het blauwe kanaal van de 2 stacks is gelijk qua noise, maar de DSS stack heeft minder ruis in het rode en blauwe kanaal.January 16, 2017 at 17:35 #10880HaverkampParticipantDus dit geeft een heel ander beeld, dan de ruis inschatting die @keesscherer, aan het begin van dit draadje gaf.
Ter vegelijking de waardes die Kees door PI heeft laten uit rekenen zonder normalisatie:
MRS ruis :
———-
Pi stack:
rood noise 5.038E-5 percentage 14,64 scales 4
groen noise 4,351E-5 percentage 30.56 scales 4
blauw noise 4,673E-5 percentage 21.7 scales 4DSS stack
rood noise 2.410E-4 percentage 4,78 scales 4
groen noise 1,583E-4 percentage 17,94 scales 4
blauw noise 1,574E-4 percentage 19,78 scales 4En nogmaals de ruis waardes die APP vindt zonder normalisatie
Pi stack:
rood noise 1.7387604981816365E-4 percentage 21.52440434883183 scales 4
groen noise 1.4563851524116464E-4 percentage 37.826740689336106 scales 4
blauw noise 1.5878846496809418E-4 percentage 28.9440203562341 scales 4DSS stack
rood noise 3.359768775582393E-4 percentage 11.857900658212941 scales 4
groen noise 2.01182926152243E-4 percentage 27.703562340966922 scales 4
blauw noise 1.9881154102635172E-4 percentage 30.01387925052047 scales 4Ik denk dat het heel evident is dat er nu een groot ??? omhoog komt bij jullie, want de APP en PI waardes komen niet overeen.
( En volgens mij weet ik het antwoord al, maar dat is op dit moment misschien niet zo handig om kenbaar te maken…)
Mabula
January 16, 2017 at 17:59 #10888 KeesSchererParticipant
KeesSchererParticipantEeeh.. Dat is een heleboel werk geweest Mabula! Dit zou denk ik een goed moment zijn om in Jip & Janneke taal wat conclusies te trekken. Ik ben bang dat ik je niet meer kan bijhouden :-) En dat komt ook omdat mijn uitgebreide statistiekopleiding op kwaliteitsgebeid hele andere termen in mijn hersenen heeft ge-etst dan hier worden gebruikt.
January 16, 2017 at 18:13 #10890 GroenewoldParticipant
GroenewoldParticipantWat @bula gewoon laat zien is dat 1+1, 2 is en niet 3 of 4 zoals DSS en PI aangeven.
January 16, 2017 at 19:21 #10891HaverkampParticipantIk begrijp inmiddels dat een en ander misschien niet goed te volgen is. Het is zeker lastig om het in simpele taal uit te leggen en daarom heb ik zoveel mogelijk plaatjes erbij gezet. Samen met de histogrammen zou dat de boel moeten verduidelijken, dacht ik. Het is ook erg veel informatie die ik vanmiddag heb gedeeld.
Het begrip dispersie uit de statistiek:
https://en.wikipedia.org/wiki/Statistical_dispersionDat geeft dus de mate van spreiding weer van een distributie ten opzichte van de centrale waarde/lokatie van de distributie.
En de mate van dispersie kan je op allerlei verschillende manieren uitrekenen waarbij er vooral verschillen zijn in de robuustheid van de gevonden waardes. Zo is de standaard deviatie veel gevoeliger voor outliers dan bijvoorbeeld MAD.
January 16, 2017 at 19:29 #10892HaverkampParticipantMijn conclusie na dit hele lange betoog is: de DSS stack is beter dan de PI stack als je puur naar ruis in de stack kijkt. Ik kom tot die conclusie na het normaliseren van beide stacks voor zowel lokatie als dispersie.
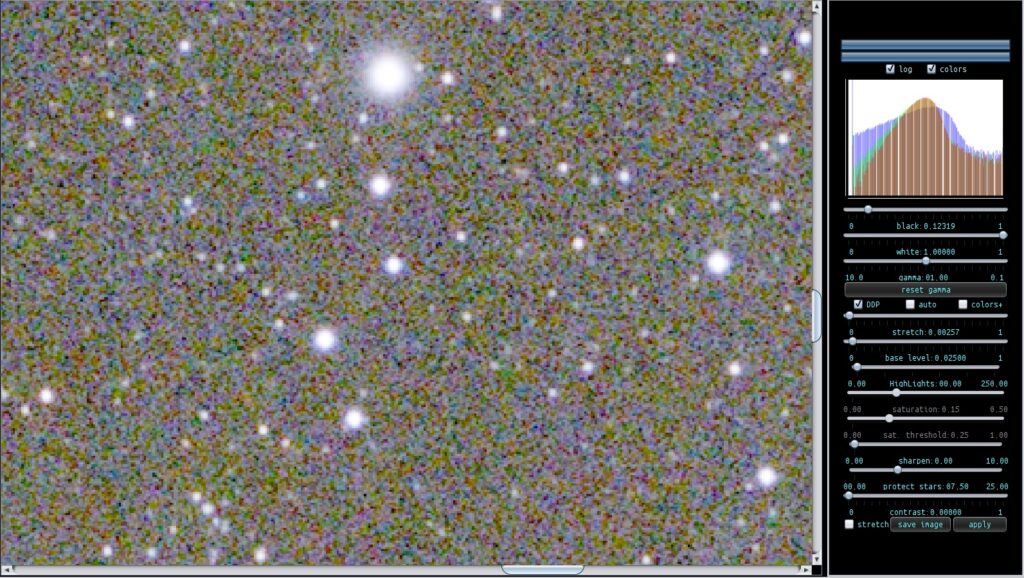
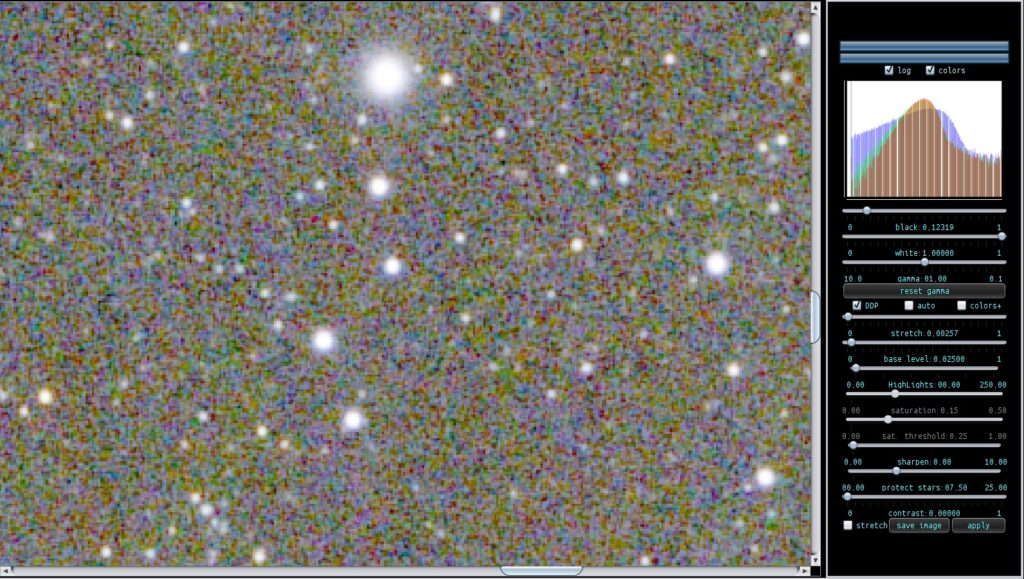
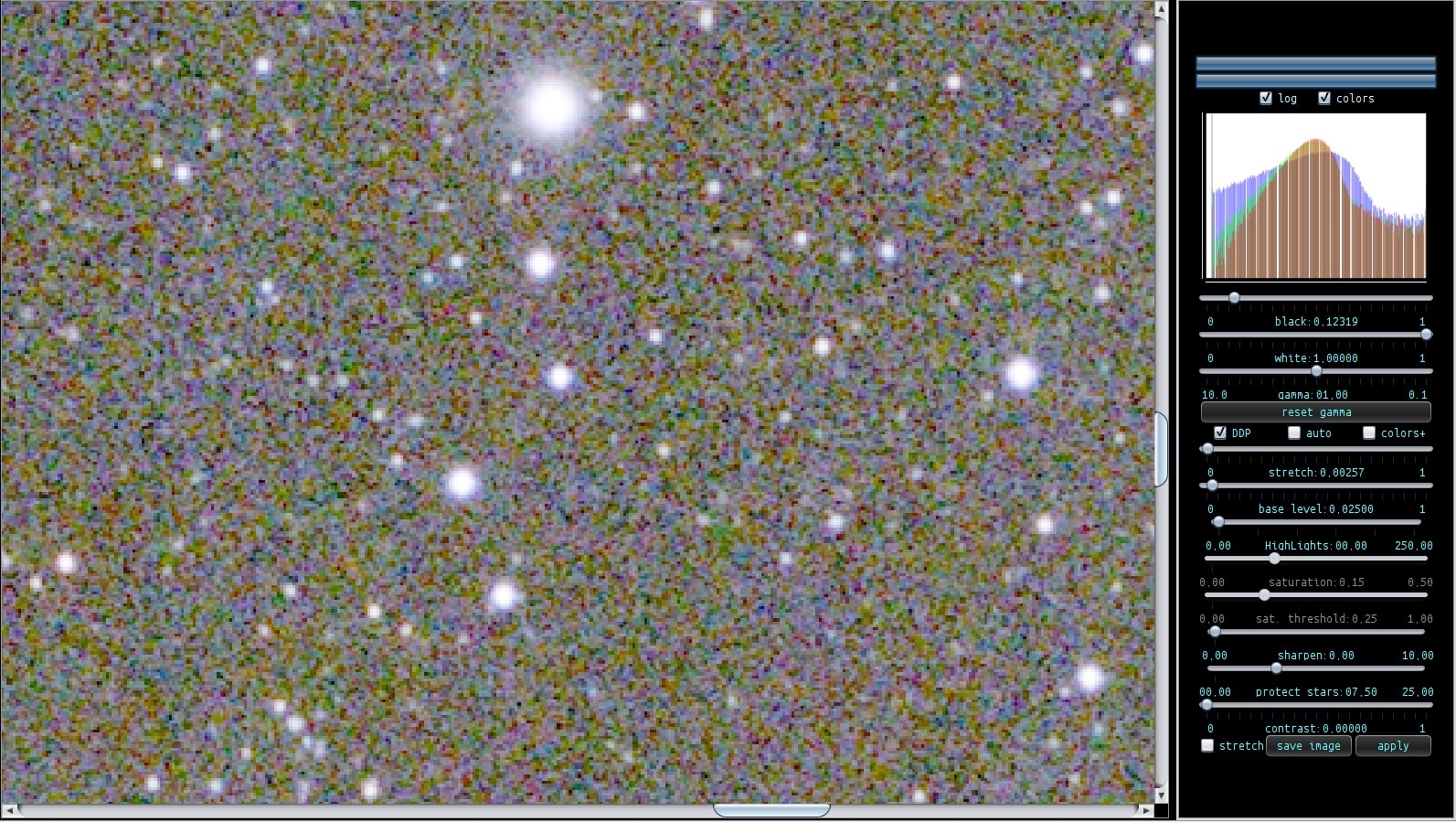
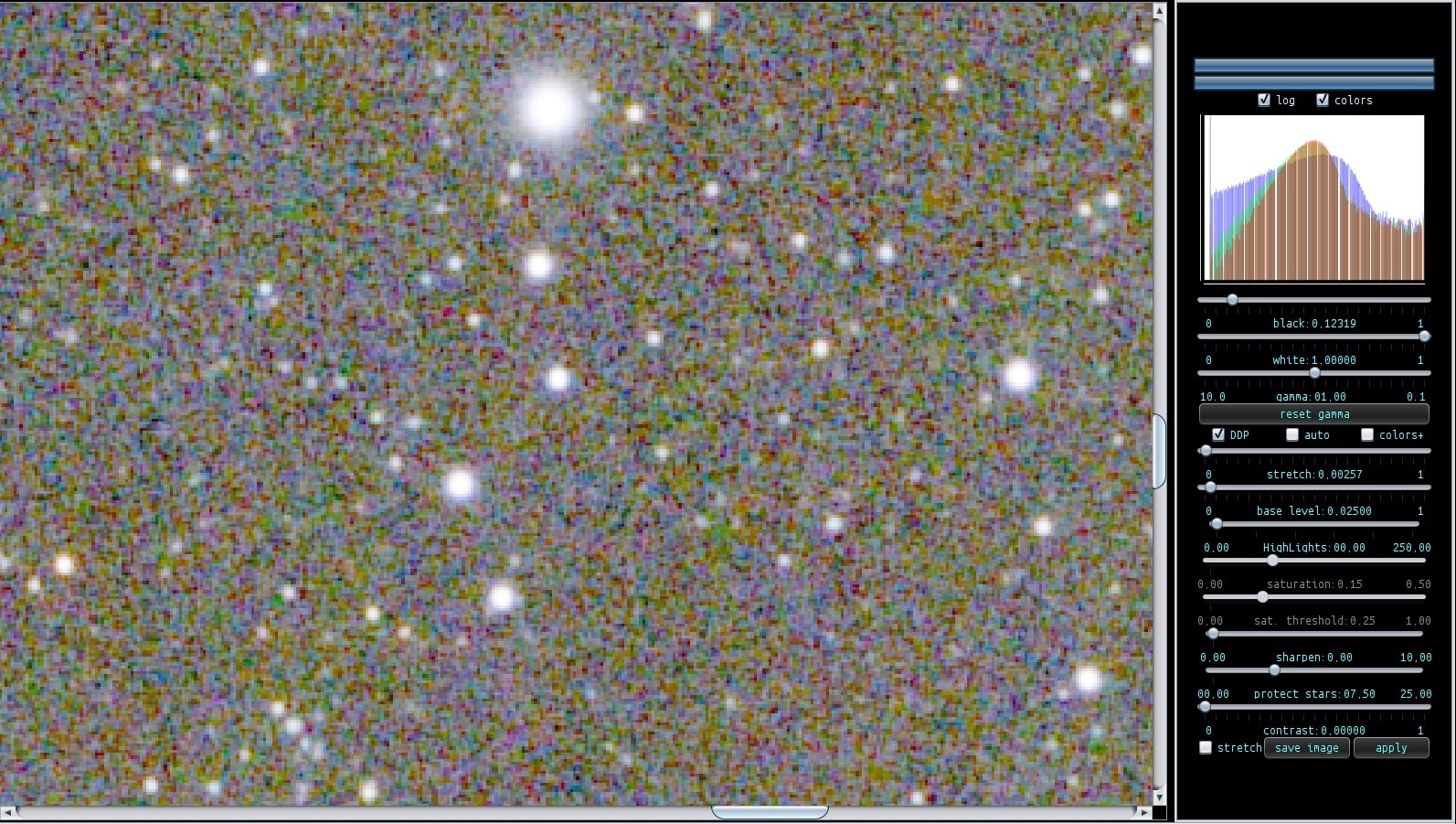
January 16, 2017 at 19:46 #10893HaverkampParticipantEn ter bevestiging een visuele inspectie van een kleine stukje hemelachtergrond van de 2 stacks die genormaliseerd zijn voor lokatie en dispersie en waarvan de hemelachtergrond is geneutraliseerd.
Identieke stretch zonder saturatie, puur om de ruis in de achtergrond qua structuur te zien.
Het verschil is subtiel, maar de achtergrond in de DSS stack is gewoon gladder.
Eerste plaatje is de PI stack en de tweede is de DSS stack:
-
AuthorPosts




- You must be logged in to reply to this topic.