© 30 March 2022, Nicolàs de Hilster & starry-night.nl
Dit artikel bespreekt het meten van bewegingen van een astrofotografieopstelling door middel van astro-foto’s. Door met een vaste kijker opnames in een vaste richting (in altitude en azimuth) opnames te maken en deze te plate-solven en naar altitude en azimuth op JNOW om te rekenen, kan een goed beeld verkregen worden van de stabiliteit van de opstelling.
Aangezien ik unguided fotografeer, was ik benieuwd hoe stabiel mijn observatorium is. Het correct volgen van de hemel is immers afhankelijk van de stabiliteit van de opstelling. Kantelt de montering gedurende het fotograferen, dan zal deze dat niet in de gaten hebben en zullen bij lange opnamen de sterren versmeerd raken. Om een idee te krijgen van de vereiste volgnauwkeurigheid, is een simpele rekensom nodig. Stel ik heb een FWHM van 4 boogseconden en ik wil dat de excentriciteit beneden de 0.5 blijft, dan mag de drift maximaal 0.6 boogseconden zijn. De langste subs die ik neem zijn 420 seconden. Dit betekent dus dat in 420 seconden 0.6 boogseconden drift mag optreden en dat per uur (3600 seconden) dit dus maximaal 3600 / 420 x 0.6 = 5 boogseconden mag zijn.
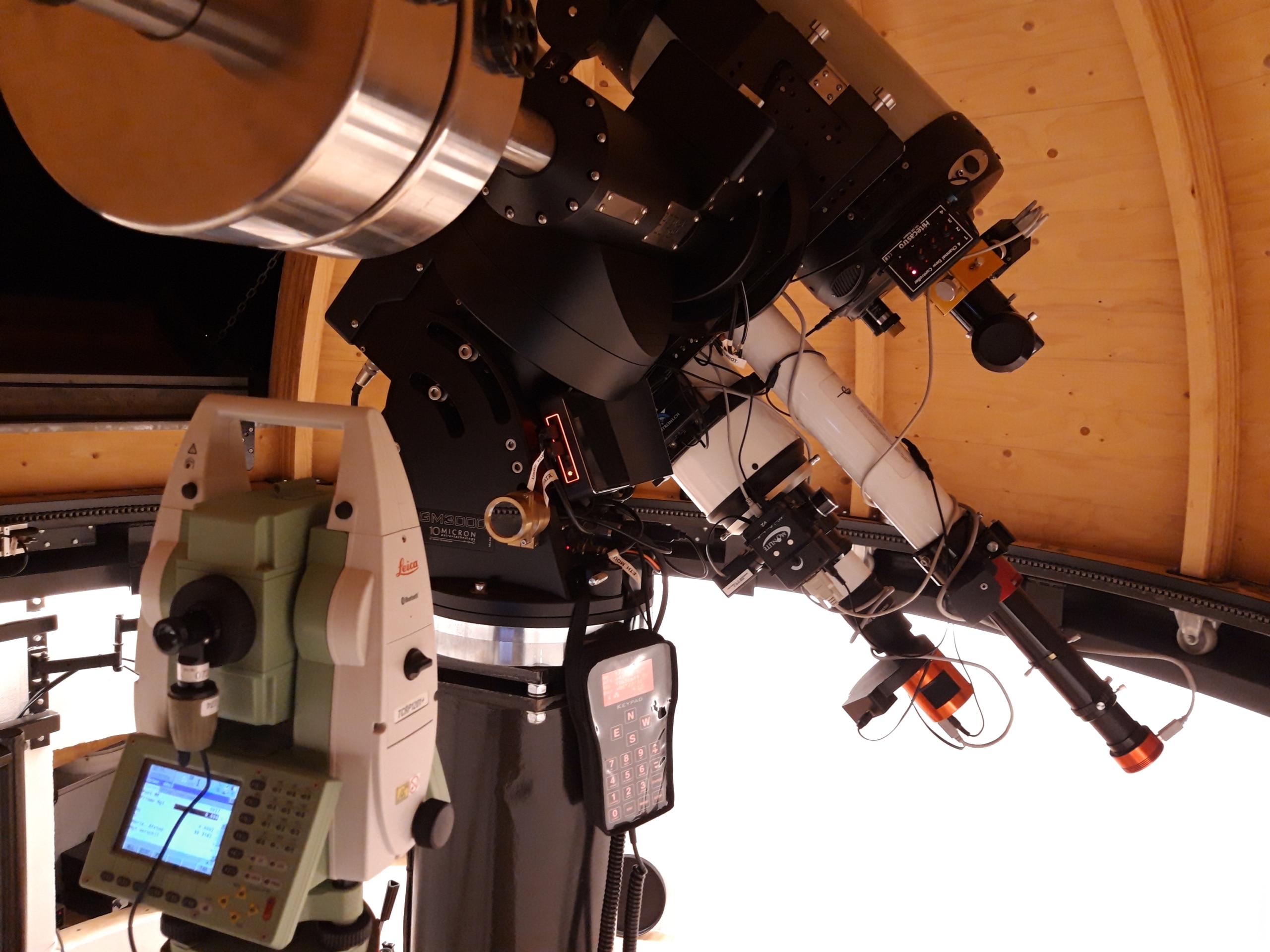
Afgelopen jaar had ik al eens met een high-end total-station (een landmeetkundig instrument, zie afbeelding 1) een zogeheten auto-collimatiemeting uitgevoerd en daaruit volgde dat, over het half uur dat ik de meting gedaan had, geen significante deformatie optrad (minder dan 2 boogseconden). Nu vereiste die meting dat ikzelf daarbij constant aanwezig was (voor de waarnemingen) en niet mocht bewegen. Aangezien dit niet uitnodigend is voor een nacht-lange sessie zocht ik dus naar een andere manier dat wel te kunnen doen.
{kind=link}
Geïnspireerd door het werk van 10Micron-bezitter Massimiliano Chersich, ben ik zelf ook gaan programmeren. Waar Chersich eigen opnamesoftware gebruikte voor het genereren van de FITS, wou ik gebruik maken van standaard (liefst gratis) software voor de opname en verwerking met een eigen programma. Voor de opname lagen twee programma’s voor de hand: FireCapture en NINA. Aangezien FireCapture niet de benodigde weergegevens kan binnenhalen en opslaan, viel de uiteindelijke keuze op NINA. Voor de verwerking was wel eigen software nodig, aangezien alleen Chersich een oplossing hiervoor had. Daarom onlangs FITSalize geschreven, een command-line tool dat met behulp van ASTAP de foto’s analyseert. Uit de foto’s haalt FITSalize de volgende gegevens:
- Lat/lon van het observatorium (rechtstreeks uit de header)
- het tijdstip en belichtingstijd van de opname
- RA/DEC in J2000 (na plate-solve met ASTAP)
- Focuser positie (rechtstreeks uit de header)
- Temperatuur en luchtdruk (rechtstreeks uit de header)
- SQM-waarden (na plate-solve met ASTAP)
De lat/lon en het tijdstip zijn nodig voor de berekeningen van altitude en azimuth, waarbij de helft van de belichtingstijd gebruikt wordt om deze eventueel te corrigeren (instelbaar via het bijbehoren FITSalize.ini-bestand). De RA/DEC positie van de FITS worden omgerekend naar JNOW via presessie, nutatie en aberratie. Deze JNOW coördinaten worden vervolgens omgerekend naar alt/azi, waarbij de luchtdruk en temperatuur gebruikt worden voor het bepalen van de refractie om de altitude nog te verfijnen. De focuser positie en SQM-waarden zijn niet van belang voor de deformatiemetingen, maar worden gebruikt om de temperatuurscoëfficiënt van de kijker en de lichtvervuiling van de omgeving te bepalen (zie mijn post over SQM-metingen met ASTAP).
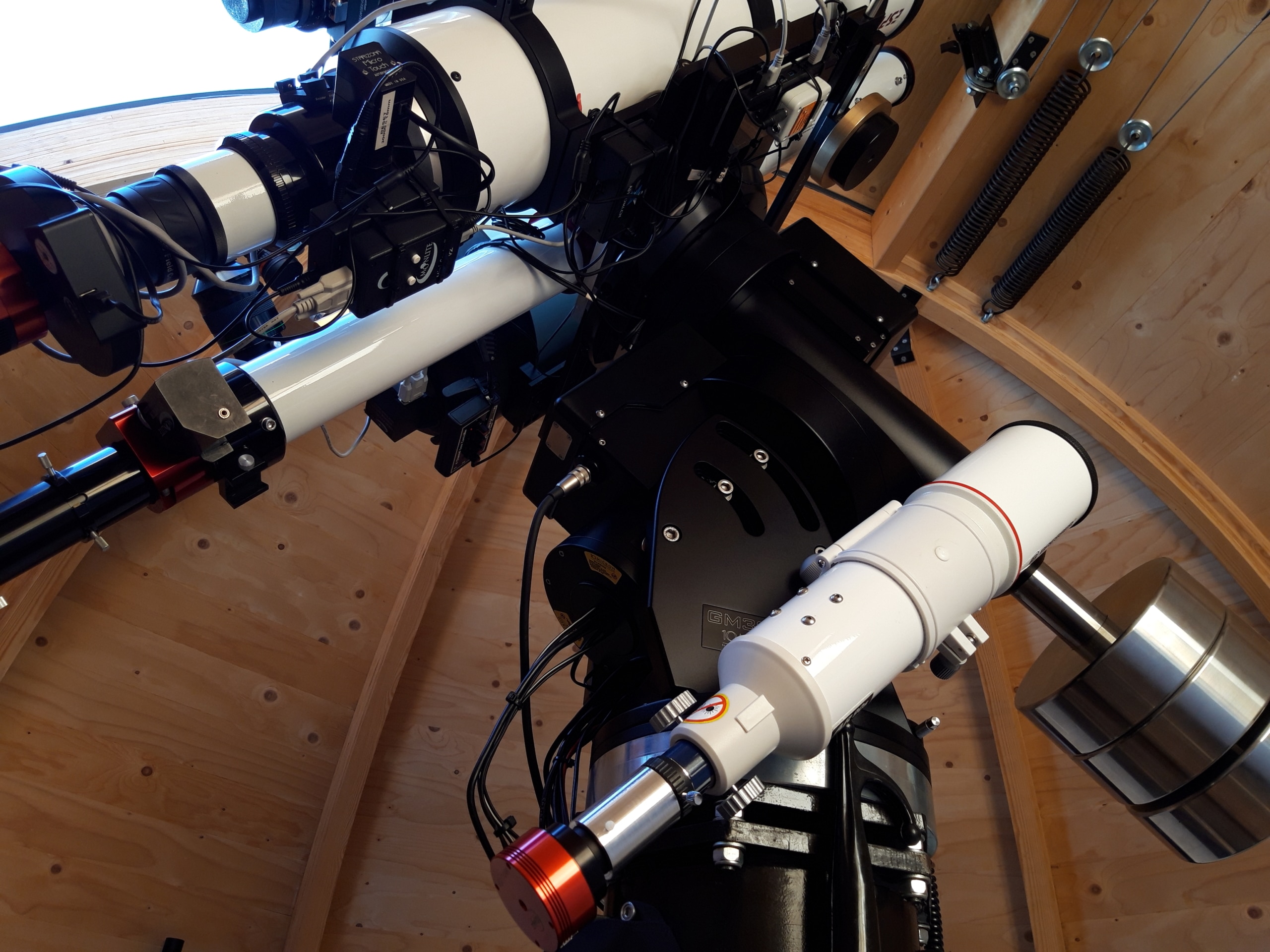
Als apparatuur heb ik gekozen voor een Bresser Messier 90/500 f5.5 achromatische refractor die ik nog had liggen (zie afbeelding 2), maar in principe zou elke volgkijker geschikt zijn. De kijker is met een Vixen zwaluwstaartklem aan de basis van de montering geschroefd. Heel bewust is ervoor gekozen de kijker niet op de montering te plaatsen, maar eronder (dus aan de kolom), aangezien de assen van de montering bij stilstand door temperatuurwisselingen qua oriëntatie kunnen veranderen en dus niet stabiel genoeg zijn voor een dergelijke meting. Achter de kijker heb ik de ZWO ASI174MM, die ik normaal gesproken voor de planeten gebruik, gemonteerd. NINA werd gebruikt voor de opnames, waarbij alleen de camera, een MGBox weerstation en een gesimuleerde montering (zie verderop) verbonden waren. Als alternatief voor de MGBox kan de OpenWeatherMap ASCOM driver gebruikt worden (deze zit standaard in de ASCOM 6.5 installatie). Verder is het van belang dat de computer keurig op tijd loopt. Dit kan via Windows Time Synch (w32tm) of via de Meinberg NTP Package.
Om ervoor te zorgen dat lat/lon van het observatorium daadwerkelijk in de FITS-header terecht komen, dient er een montering aangesloten te zijn. Voor de deformatiemetingen heb ik ervoor gekozen de standaard ASCOM telescope-simulator te gebruiken, zodat de eigenlijke montering uitgeschakeld kon blijven. Even de lengte- en breedtegraad (lat/lon) instellen en de virtual keypad gebruiken om de simulator ongeveer in dezelfde richting te zetten als dat de meting gedaan wordt en de meting kan beginnen (binnen circa 10° tot 20° is goed genoeg).
Na verzamelen van de benodigde FITS kan FITSalize aan de slag (voor uitleg en instructies zie mijn website), met een uitvoerbestand tot gevolg. Dit bestand kan eenvoudig in Excel tot wat grafieken omgezet worden met de templates die bij het pakket meegeleverd zijn. Afbeelding 3 laat het resultaat van de eerste deformatiemeting te zien. Zowel altitude als azimuth zijn stabiel binnen circa 4 boogseconden, het steilste deel is circa 3 boogseconden per uur, hetgeen nog altijd te laag is om de fotografie serieus te verstoren.
In de afgelopen week heb ik veelvuldig overleg gehad met mede Starry-Night lid en auteur van ASTAP Han Kleijn (@han-k). Ook Han is druk bezig met deze routine in ASTAP in te bouwen, zodat er binnenkort een wat vriendelijke gebruikersinterface beschikbaar komt voor dit soort metingen. Bovendien biedt het de mogelijkheid de nauwkeurigheid van de programma’s met elkaar te vergelijken. FITSalize is volledig gebaseerd op het werk: Meeus, J. Astronomical Algorithms, Second Edition (Richmond, 2005), die van Han op P.T. Wallace’s SLALIB positional astronomy library van het Rutherford Appleton Laboratory.
© 30 september 2022, Nicolàs de Hilster & starry-night.nl
Ja het is een interessante toepassing van astrometric (plate) solving. Daar Nicolàs en ik met wat vallen en opstaan met verschillende software tot vrijwel dezelfde getallen komen geeft vertrouwen in de deflectie/stabiliteits berekening. Annual aberration, precession, nutation en refractie worden gecompenseerd.
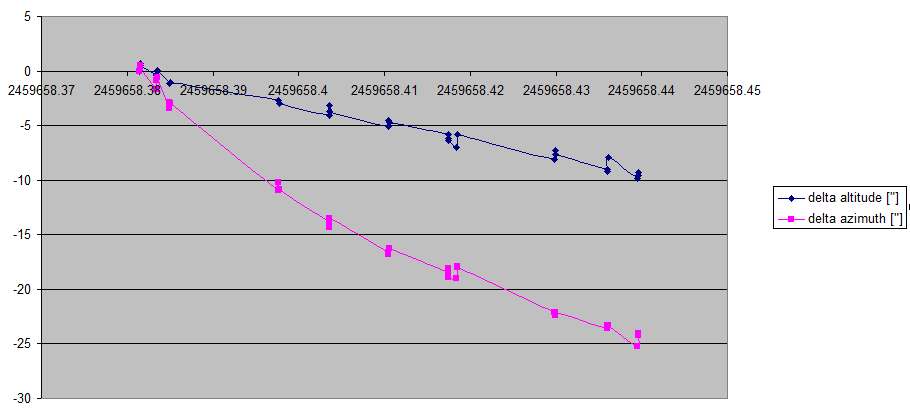
Een stabilteitstest met mijn stationaire telescoop met tracking off geeft een wat groter verloop. Met mijn setup (HEQ5 op een houten paal) heeft 1,5 uur regelmatig fotos gemaakt. De gemeten drift is beperkt to circa 25 boogseconden in elke as. Meer testen zijn in de toekomst geplanned.
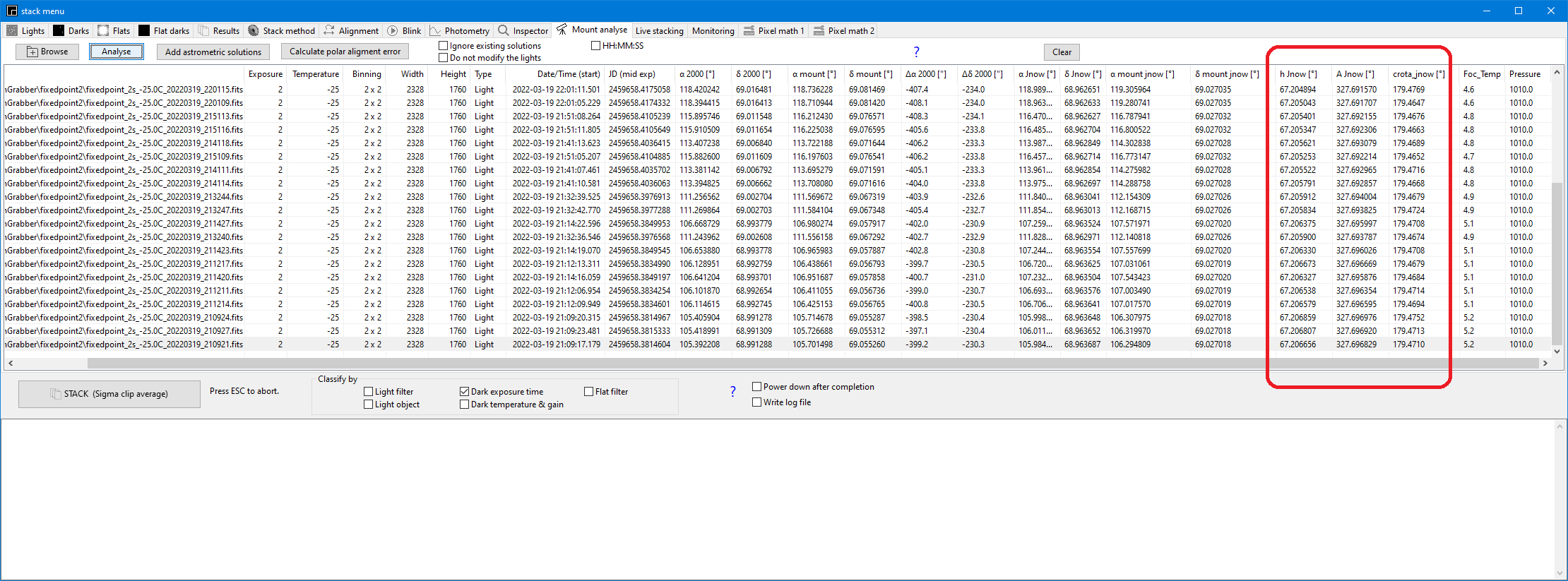
Gebruik met ASTAP v2022-3-31 is eenvoudig. Een aantal FITS file opnames maken met een stationare camera. Fotos laden in ASTAP, tab “mount analyse”. Dan klik op knop solve, klik op knop analyse en de analyse wordt weergegeven. Met CTRL-A en CTRL-C kopieer je de data in de Windows clipboard waarna het met plakken naar een spreadsheet gekopieerd kan worden voor analyse.
Ik had twee plaatjes willen toevoegen maar dat gaat niet met comments.
Han
Hier zijn de plaatjes via een omweg:
Verloop over 1.5 uur van mijn sterrenwacht:
Gebruik van ASTAP: